
Módulo do Motorista do Servo Motor Pca9685 16 Canais 12 Bits Pwm I2c Robô Peças 15
R$ 19,91
DÚVIDAS?
Envie um email para:
Componentes Ativos
Opção de Compra e tempo de entrega
Aviso Para mais informações sobre esse produto com preço promocionais e forma de entrega, click no botão abaixo e visite o portal da loja

| Veja maiores detalhes nas imagens de referências abaixo |
|---|
Imagem Produto 1 |
 |
Imagem Produto 2 |
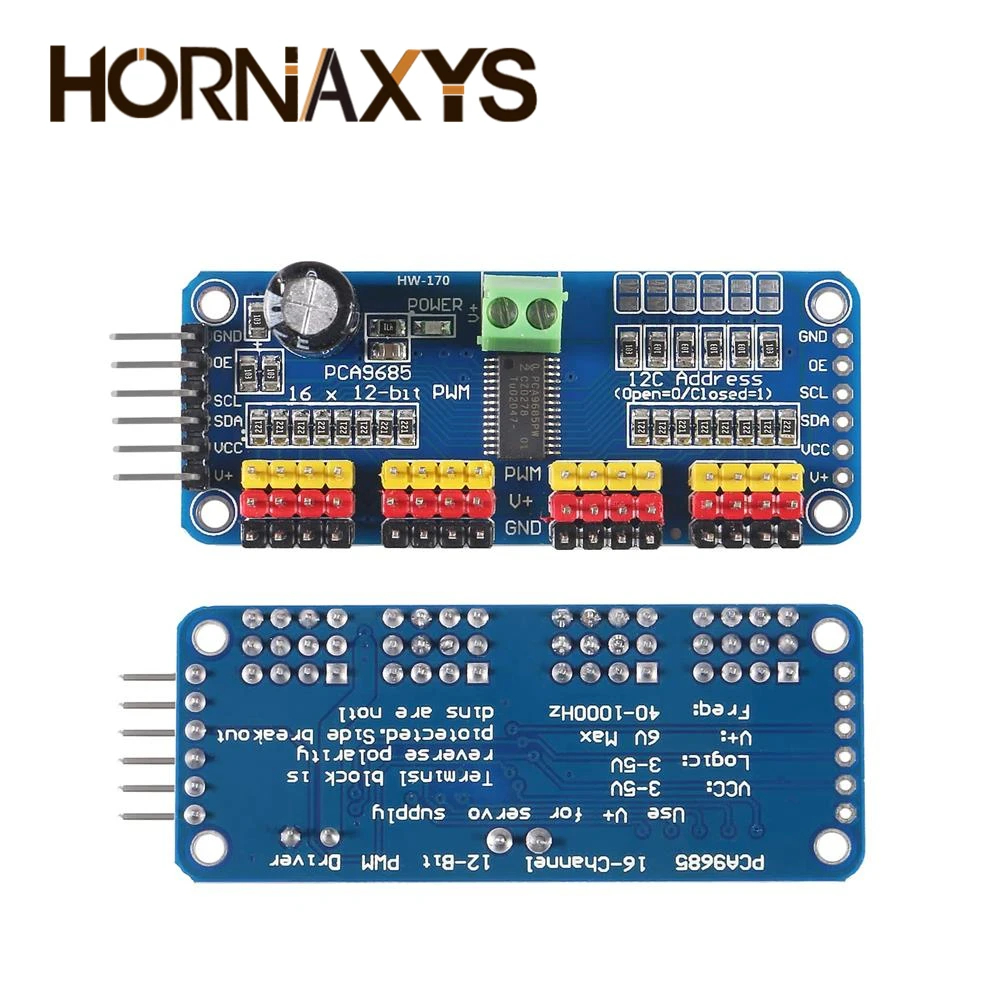 |
Imagem Produto 3 |
 |
Imagem Produto 4 |
 |
Imagem Produto 5 |
 |
Avaliações de Usuários
Seja o primeiro a avaliar “Módulo do Motorista do Servo Motor Pca9685 16 Canais 12 Bits Pwm I2c Robô Peças 15”
Produtos relacionados




![Original de Alta Original: v 12a 100 w 30-200 Mhz Case 316-01] -transistor Qualidade 100% Mrf317 28 V-65](https://ae01.alicdn.com/kf/HTB18CnsQYvpK1RjSZFqq6AXUVXaS/100-original-mrf317-mrf317-28-v-65-v-12a-100-w-30-200-mhz-caso-316.jpg)

Módulo do Motorista do Servo Motor Pca9685 16 Canais 12 Bits Pwm I2c Robô Peças 15
R$ 19,91






Módulo do Motorista do Servo Motor Pca9685 16 Canais 12 Bits Pwm I2c Robô Peças 15
R$ 16,46
DÚVIDAS?
Envie um email para:
Componentes Ativos
Opção de Compra e tempo de entrega
Aviso Para mais informações sobre esse produto com preço promocionais e forma de entrega, click no botão abaixo e visite o portal da loja
Ficha técnica do produto
| Características | Especificações |
|---|---|
| Condição | Novo |
| Tipo | Regulador de Tensão |
| Origem | CN (origem) |
1-5pcs PCA9685 16 Canais 12-bit PWM Servo motor Driver I2C Módulo Robô
Descrição:
Quer fazer um andador de hexapod Talvez você esteja fazendo uma obra de arte com toneladas de peças móveis, ou você precisa dirigir uma tonelada de LEDs com saída PWM precisa. Seu microcontrolador tem um número limitado de saídas PWM, e você encontra-se esgotando! Não com o Adafruit 16-Channel 12-bit PWM/Servo Driver-interface I2C. Com esta fuga de driver pwm e servo, você pode control 16 saídas PWM de execução livre com apenas dois pinos! Precisa de executar mais de 16 saídas PWM Sem problema. Cadeia juntos até 62 dessas belezas para até um excelente 992 saídas de PWM.
Características:
Dimensões (sem cabeçalhos ou bloco de terminais) 2,5 &x 1& x 0,1 &(62,5mm x 25,4mm x 3mm)
Peso (sem cabeçalhos ou bloco terminal): 5,5 gramas
Peso (com cabeçalhos 3×4 e bloco terminal): 9 gramas
Esta placa/chip usa I2C endereço de 7 bits entre 0x60-0x80, selecionável com jumpers
Bloco terminal para entrada de energia (ou você pode usar os 0,1 &fugas no lado)
Proteção contra polaridade reversa na entrada do bloco terminal
Energia verde-bom LED
3 conectores de pinos em grupos de 4 para que você possa conectar 16 servos de uma só vez (os plugues servo são ligeiramente mais largos que 0,1 &, então você só pode empilhar 4 próximos uns dos outros no cabeçalho de 0,1&
Design &Chain-able&
Um ponto para colocar um capacitor grande na linha V + (no caso de você precisar)
220 ohm série resistores em todas as linhas de saída para protegê-los, e para tornar a condução LEDs trivial
Solda jumpers para o 6 endereço selecione pinos
I2c-controlled PWM driver com um construído em relógio. Ao contrário da família TLC5940, você não precisa enviar continuamente o sinal amarrando seu microcontrolador, seu funcionamento completamente livre!
É 5V complacente, o que significa que você pode controlá-lo a partir de um microcontrolador 3.3V e ainda conduzir com segurança até 6V saídas (isso é bom para quando você quer controlar LEDs brancos ou azuis com 3,4 + tensões para a frente)
6 pinos de seleção de endereços para que você possa conectar até 62 deles em um único barramento i2c, um total de 992 saídas-isso é um monte de servos ou LEDs
Frequência ajustável PWM até cerca de 1,6 KHz
Resolução de 12 bits para cada saída-para servos, o que significa cerca de resolução 4us a 60Hz taxa de atualização
Saída push-pull ou open-dreno configurável
Saída habilitar pino para desativar rapidamente todas as saídas
(1)Drive board conectado ao Arduino:
A placa de driver PWM usa o método I2C, portanto, apenas quatro linhas podem ser conectadas ao dispositivo Arduino:
Modo pino &clássico& do Arduino:
+ 5v -> VCC
GND -> GND
Analógico 4 -> SDA
Analógico 5 -> SCL
Maneira mega velha do pino:
+ 5v -> VCC
GND -> GND
20 Digitais-> SDA
21 digitais-> SCL
Método do pino do Arduino R3 e posterior (Uno, Mega e
Leonardo):
(Estas placas têm pinos dedicados SDA e SCL)
+ 5v -> VCC
GND -> GND
SDA -> SDA
SCL -> SCL
O pino VCC é apenas para a fonte de alimentação do chip, se você quiser conectar as luzes servo ou LED, use a fonte de alimentação V + pin, V + pino suporta 3.3 ~ 6V fonte de alimentação (chip tensão segura 5V). Recomenda-se conectar a fonte de alimentação externa através do terminal de alimentação.
(2) poder fornecer parte:
A maior parte da tensão do projeto servo é de 5 ~ 6V, especialmente em vários equipamentos de direção ao mesmo tempo em execução, com a necessidade de fonte de alimentação de alta potência. Se você estiver usando diretamente o pino Arduino 5V para alimentar o servo diretamente, existem alguns problemas imprevisíveis, por isso recomendamos que você tenha uma fonte de alimentação externa adequada para a placa de acionamento.
(3) Conecte o servo:
A maioria dos servos são conectados usando plugues fêmea de 3 fios padrão, desde que o pino correspondente na placa de motorista nele. (O fio terra é geralmente preto ou marrom, a linha de sinal é geralmente amarela ou branca)
(4) para o endereço atribuído à placa do condutor:
Cada placa de transmissão da cascata precisa ter um endereço de acesso exclusivo. O endereço I2C inicial de cada placa de motorista é 0 × 40, você pode modificar o canto superior direito do endereço I2C do jumper. Conecte um jumper com solda para indicar um número binário &1&.
1. Componentes Ativos – Feature 1 : 264kb of Sram And 4mb of On-board Flash Memory

2. Circuitos Integrados – Origem : cn Origem

3. Módulo do Motorista do Servo Motor Pca9685 – tipo : Unidade ic

4. Componentes Ativos – Condição : Novo

5. Circuitos Integrados – Número do Modelo : Rp2040-one

6. Módulo do Motorista do Servo Motor Pca9685 – Feature 3 : Low-power Dormir And Dormant Modes

Avaliações de Usuários
Não existe nenhuma avaliação ainda.
Seja o primeiro a avaliar “Módulo do Motorista do Servo Motor Pca9685 16 Canais 12 Bits Pwm I2c Robô Peças 15”
Produtos relacionados




Módulo do Motorista do Servo Motor Pca9685 16 Canais 12 Bits Pwm I2c Robô Peças 15
R$ 16,46

Não existe nenhuma avaliação ainda.